9 results
(View BibTeX file of all listed publications)
2019

Scientific Report 2016 - 2018
2019 (mpi_year_book)
This report presents research done at the Max Planck Institute for Intelligent Systems from
January 2016 to December 2018. It is our third report since the founding of the institute in 2011.
This status report is organized as follows: we begin with an overview of the institute, including
its organizational structure (Chapter 1). The central part of the scientific report consists of chapters
on the research conducted by the institute’s departments (Chapters 2 to 5) and its independent
research groups (Chapters 6 to 18), as well as the work of the institute’s central scientific facilities
(Chapter 19). For entities founded after January 2016, the respective report sections cover work
done from the date of the establishment of the department, group, or facility.
2017
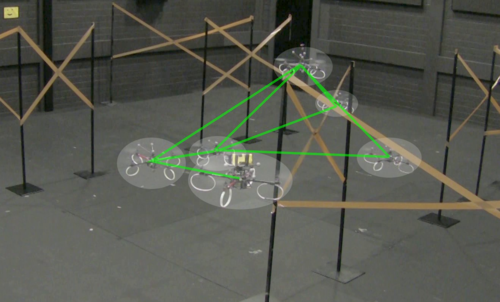
Decentralized Simultaneous Multi-target Exploration using a Connected Network of Multiple Robots
Nestmeyer, T., Robuffo Giordano, P., Bülthoff, H. H., Franchi, A.
In pages: 989-1011, Autonomous Robots, 2017 (incollection)
2014
Simulated Annealing
In Encyclopedia of Computer Vision, pages: 737-741, 0, (Editors: Ikeuchi, K. ), Springer Verlag, 2014, to appear (inbook)
2013

Class-Specific Hough Forests for Object Detection
Gall, J., Lempitsky, V.
In Decision Forests for Computer Vision and Medical Image Analysis, pages: 143-157, 11, (Editors: Criminisi, A. and Shotton, J.), Springer, 2013 (incollection)
2012

An Introduction to Random Forests for Multi-class Object Detection
Gall, J., Razavi, N., van Gool, L.
In Outdoor and Large-Scale Real-World Scene Analysis, 7474, pages: 243-263, LNCS, (Editors: Dellaert, Frank and Frahm, Jan-Michael and Pollefeys, Marc and Rosenhahn, Bodo and Leal-Taix’e, Laura), Springer, 2012 (incollection)

Home 3D body scans from noisy image and range data
Weiss, A., Hirshberg, D., Black, M. J.
In Consumer Depth Cameras for Computer Vision: Research Topics and Applications, pages: 99-118, 6, (Editors: Andrea Fossati and Juergen Gall and Helmut Grabner and Xiaofeng Ren and Kurt Konolige), Springer-Verlag, 2012 (incollection)
2011

Steerable random fields for image restoration and inpainting
Roth, S., Black, M. J.
In Markov Random Fields for Vision and Image Processing, pages: 377-387, (Editors: Blake, A. and Kohli, P. and Rother, C.), MIT Press, 2011 (incollection)
This chapter introduces the concept of a Steerable Random Field (SRF). In contrast to traditional Markov random field (MRF) models in low-level vision, the random field potentials of a SRF are defined in terms of filter responses that are steered to the local image structure. This steering uses the structure tensor to obtain derivative responses that are either aligned with, or orthogonal to, the predominant local image structure. Analysis of the statistics of these steered filter responses in natural images leads to the model proposed here. Clique potentials are defined over steered filter responses using a Gaussian scale mixture model and are learned from training data. The SRF model connects random fields with anisotropic regularization and provides a statistical motivation for the latter. Steering the random field to the local image structure improves image denoising and inpainting performance compared with traditional pairwise MRFs.
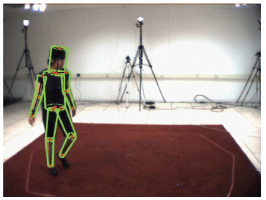
Benchmark datasets for pose estimation and tracking
Andriluka, M., Sigal, L., Black, M. J.
In Visual Analysis of Humans: Looking at People, pages: 253-274, (Editors: Moesland and Hilton and Kr"uger and Sigal), Springer-Verlag, London, 2011 (incollection)

Scientific Report 2016 - 2021
(mpi_year_book)
This report presents research done at the Max Planck Institute for Intelligent Systems from January2016 to November 2021. It is our fourth report since the founding of the institute in 2011. Dueto the fact that the upcoming evaluation is an extended one, the report covers a longer reportingperiod.This scientific report is organized as follows: we begin with an overview of the institute, includingan outline of its structure, an introduction of our latest research departments, and a presentationof our main collaborative initiatives and activities (Chapter1). The central part of the scientificreport consists of chapters on the research conducted by the institute’s departments (Chapters2to6) and its independent research groups (Chapters7 to24), as well as the work of the institute’scentral scientific facilities (Chapter25). For entities founded after January 2016, the respectivereport sections cover work done from the date of the establishment of the department, group, orfacility. These chapters are followed by a summary of selected outreach activities and scientificevents hosted by the institute (Chapter26). The scientific publications of the featured departmentsand research groups published during the 6-year review period complete this scientific report.