Joint 3D Estimation of Vehicles and Scene Flow
2015
Conference Paper
avg
ps
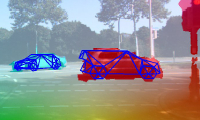
Three-dimensional reconstruction of dynamic scenes is an important prerequisite for applications like mobile robotics or autonomous driving. While much progress has been made in recent years, imaging conditions in natural outdoor environments are still very challenging for current reconstruction and recognition methods. In this paper, we propose a novel unified approach which reasons jointly about 3D scene flow as well as the pose, shape and motion of vehicles in the scene. Towards this goal, we incorporate a deformable CAD model into a slanted-plane conditional random field for scene flow estimation and enforce shape consistency between the rendered 3D models and the parameters of all superpixels in the image. The association of superpixels to objects is established by an index variable which implicitly enables model selection. We evaluate our approach on the challenging KITTI scene flow dataset in terms of object and scene flow estimation. Our results provide a prove of concept and demonstrate the usefulness of our method.
| Author(s): | Moritz Menze and Christian Heipke and Andreas Geiger |
| Book Title: | Proc. of the ISPRS Workshop on Image Sequence Analysis (ISA) |
| Year: | 2015 |
| Department(s): | Autonomous Vision, Perceiving Systems |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Links: |
PDF
|
|
BibTex @inproceedings{Menze2015ISA,
title = {Joint 3D Estimation of Vehicles and Scene Flow},
author = {Menze, Moritz and Heipke, Christian and Geiger, Andreas},
booktitle = {Proc. of the ISPRS Workshop on Image Sequence Analysis (ISA)},
year = {2015},
doi = {}
}
|
|