Coregistration: Simultaneous alignment and modeling of articulated 3D shape
2012
Conference Paper
ps
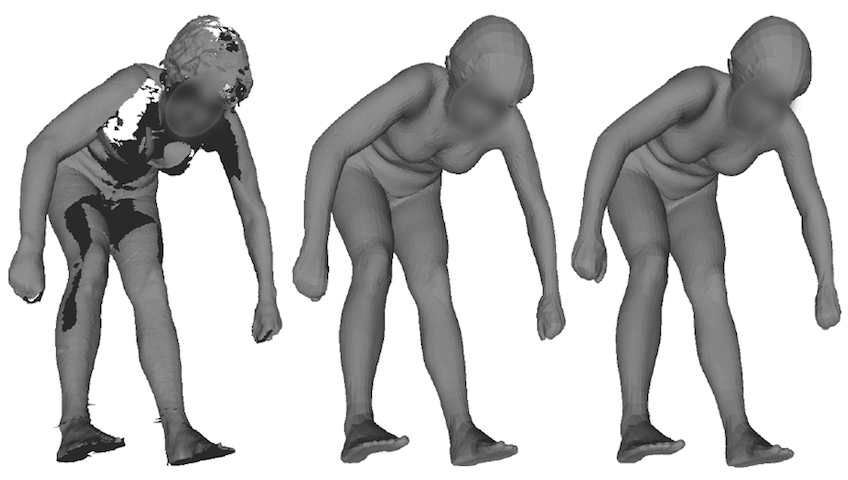
Three-dimensional (3D) shape models are powerful because they enable the inference of object shape from incomplete, noisy, or ambiguous 2D or 3D data. For example, realistic parameterized 3D human body models have been used to infer the shape and pose of people from images. To train such models, a corpus of 3D body scans is typically brought into registration by aligning a common 3D human-shaped template to each scan. This is an ill-posed problem that typically involves solving an optimization problem with regularization terms that penalize implausible deformations of the template. When aligning a corpus, however, we can do better than generic regularization. If we have a model of how the template can deform then alignments can be regularized by this model. Constructing a model of deformations, however, requires having a corpus that is already registered. We address this chicken-and-egg problem by approaching modeling and registration together. By minimizing a single objective function, we reliably obtain high quality registration of noisy, incomplete, laser scans, while simultaneously learning a highly realistic articulated body model. The model greatly improves robustness to noise and missing data. Since the model explains a corpus of body scans, it captures how body shape varies across people and poses.
| Author(s): | Hirshberg, D. and Loper, M. and Rachlin, E. and Black, M.J. |
| Book Title: | European Conf. on Computer Vision (ECCV) |
| Pages: | 242--255 |
| Year: | 2012 |
| Month: | October |
| Series: | LNCS 7577, Part IV |
| Editors: | A. Fitzgibbon et al. (Eds.) |
| Publisher: | Springer-Verlag |
| Department(s): | Perceiving Systems |
| Research Project(s): |
Virtual Humans (2011-2015)
3D Mesh Registration |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1007/978-3-642-33783-3_18 |
| Links: |
pdf
publisher site poster supplemental material (400MB) |
|
BibTex @inproceedings{Hirshberg:ECCV:2012,
title = {Coregistration: Simultaneous alignment and modeling of articulated {3D} shape},
author = {Hirshberg, D. and Loper, M. and Rachlin, E. and Black, M.J.},
booktitle = {European Conf. on Computer Vision (ECCV)},
pages = {242--255},
series = {LNCS 7577, Part IV},
editors = {A. Fitzgibbon et al. (Eds.)},
publisher = {Springer-Verlag},
month = oct,
year = {2012},
doi = {10.1007/978-3-642-33783-3_18},
month_numeric = {10}
}
|
|